#include <M5StickC.h>
#include <ESP32Servo.h>
#include "time.h"
Servo servo1;
RTC_TimeTypeDef RTC_TimeStruct;
int motor_speed_min = 11; // Set motor speed to stat-up speed
int motor_speed_max = 25; // Set max motor speed for safty
int scaleNum = 16; // Number of scale per lap
int servo_minus = 1100; // servo Min 1100us
int servo_maxus = 1900; // servo Max 1900us
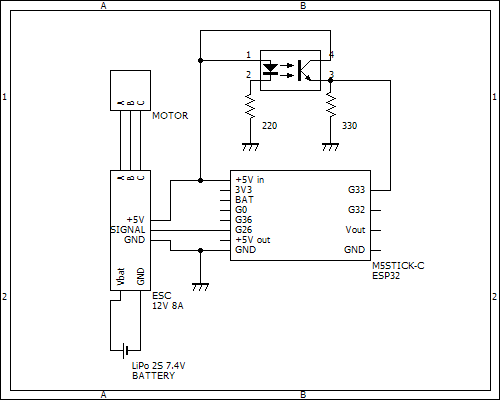
int led_pin = 10; // Pin No. for LED
int servo_pin = 26; // Pin No. for motor ESC(Electric Speed Controller)
int int_pin = 33; // Pin No. for photo interrupter
int sw_center_pin = 37; // Pin No. for Center SW
int sw_side_pin = 39; // Pin No. for Side(Right) SW
int motor_speed = 0; // Motor speed (0ÅEÅE80degree for ESC)
int lapCount = 0; // Lap counter
int ct;
int pt;
int sec = 0;
int prev_sec = 0;
int rpm;
float dev;
// Set state of the Center Button
uint8_t btn = HIGH;
uint8_t btn_prev = HIGH;
void setup() {
M5.begin();
// Initializing LCD
M5.Lcd.setRotation(0); // Set LCD rotation to vertical position
M5.Lcd.fillScreen(BLACK);
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(10, 0, 2);
M5.Lcd.println("? SYNC ?");
M5.Lcd.setCursor(0, 30);
M5.Lcd.println("SPEED");
M5.Lcd.setCursor(30, 120);
M5.Lcd.println("STOP >");
M5.Lcd.setCursor(20, 140);
M5.Lcd.println("> UP <");
M5.Lcd.setTextSize(2);
// Set center button INPUT
pinMode(sw_center_pin, INPUT_PULLUP);
pinMode(sw_side_pin, INPUT_PULLUP);
// Set LED pin as OUTPUT
pinMode(led_pin, OUTPUT);
// Initializing servo
servo1.setPeriodHertz(50);
servo1.attach(servo_pin, servo_minus, servo_maxus);
// LED OFF
digitalWrite(led_pin, HIGH );
// Output 0 to motor ESC
motorSpeedChange(motor_speed);
// Set interrupt
pinMode(int_pin, INPUT);
attachInterrupt(int_pin, senceRot, RISING);
}
void loop() {
// Speed up if the center button is pushed
btn = digitalRead(sw_center_pin);
if(btn == LOW && btn_prev == HIGH){
btn_prev = LOW;
motor_speed = motor_speed + 1;
digitalWrite(led_pin, LOW ); // LED ON
if (motor_speed < motor_speed_min){
motor_speed = motor_speed_min;
}
if (motor_speed > motor_speed_max){
motor_speed = motor_speed_max;
}
motorSpeedChange(motor_speed); // Set motor speed
delay(100);
}
if (btn == HIGH){
btn_prev = HIGH;
}
// Stop motor if the side button is pushed
if(digitalRead(sw_side_pin) == LOW)
{
motor_speed = 0;
motorSpeedChange(motor_speed); // set motor speed to 0
digitalWrite(led_pin, HIGH ); // LED OFF
}
// Display RPM & msec/div every second
M5.Rtc.GetTime(&RTC_TimeStruct);
sec = RTC_TimeStruct.Seconds;
if (sec != prev_sec)
{
int rot = lapCount;
lapCount = 0;
rpm = rot * 60;
prev_sec = sec;
M5.Lcd.setTextSize(1);
M5.Lcd.setCursor(0, 82);
M5.Lcd.printf("%05d RPM", rpm);
M5.Lcd.setCursor(0, 100);
if(rot > 0)
{
dev = (float)(1000 / rot) / scaleNum;
M5.Lcd.printf("%3.1f ms/div ", dev);
}
else
{
M5.Lcd.println("----- ");
}
M5.Lcd.setTextSize(2);
}
}
//
// Set motor speed and display motor speed
//
void motorSpeedChange(int sp){
// Display motor speed
M5.Lcd.setCursor(20, 45);
M5.Lcd.printf("%03d", motor_speed);
// Output motor speed to motor ESC in degree 0 to 180
servo1.write(sp);
delay(20);
}
//
// Call back function by inturrapt every lap
//
void senceRot(){
// Increment rotation counter if the interrupt happens after 5ms or more since the previous interrupt.
ct = millis();
if((ct - pt) > 5)
{
lapCount++;
}
pt = ct;
}